 奇瑞汽车股份有限公司底盘专家 李成 智能底盘作为跨学科技术集成的产品,是一个值得讨论的话题。李成从开发者的层面出发分析了四个方面,分别为智能底盘的存在价值、智能底盘的技术路径、奇瑞智能底盘的探索、智能底盘的冷静对待。 智能底盘存在的价值 技术发展都遵循一定规律,即从简单到复杂,复杂到不能再复杂的时候,就会有人另辟蹊径,落到汽车底盘之上也是如此。汽车从诞生之后七十年的时间,被称为纯机械时代。 当一个系统复杂到一定程度,其可靠性就受到了挑战。就像曾经在市面上存在过机械计算器,其复杂程度超出人类的想象,但性能却一般,时不时的还罢工…同样汽车底盘也是同理。 但若跨出一个技术维度,就会发现豁然开朗。在一个领域不敢相信的科技技术,到了另一个领域,突然变得很平常了。目前汽车产业处于机电混合时代,经过了四十年的发展,时至今日慢慢又遇到了瓶颈,面对越来越多新的场景和新的环境变化,程序当中没有办法穷举所有可能,既然无法穷举所有可能,那就教给它一种学习方法,当遇到一种新的环境时,可以将环境识别记录下来。这就是所谓的智能时代,互联网、大数据、深度学习等。 这也预示了底盘的下一个时代——智能时代。 智能底盘存在的价值,可以从两个维度分析。局限于底盘域范围之内,它可以在底盘四大系统,悬架,转向,制动,传动,这四大系统之间进行联合控制,产生新的特色的功能。若跳出底盘域往外延伸,智能底盘又是L3以上智能驾驶的强有力执行机构,有非常重要的存在价值。 智能底盘的技术路径 智能底盘技术发展路径,脱不开四大子系统的智能化发展,线控的制动,主动或半主动悬架,线控转向,线控驱动模块。智能底盘究其根本,还是这四个系统的智能化与在它们之间的联合控制。  对悬架系统而言,目前主流依然使用Skyhook天棚原理来控制。如图,从左到右是其的理论模型,数学模型,物理模型,实物模型,理论模型假设与车身、天棚结合在一起,无论路面多么颠簸,车身是浑然不动的。不过车身与天棚的结合,实际上是无法实现的,但是我们可以通过改变阻尼器C1来间接的实现C2,因此Skyhook是主动理论悬架当中最基本的。 实物模型是现在典型主动悬架模型,其当中有空气弹簧、CDC减震,三个车身加速度传感器,四个车轮高度传感器,一个ECU控制器。 李成表示目前他们正在从硬件和软件上对其进行优化。 在硬件上,按照天棚原理,如果想得到车身垂向加速度,现在都是通过车身加速度传感器(三个)来获取车辆的垂向加速度,车轮加速度是通过车轮和车身之间的高度传感器,两次微分之后得到加速度。如果用一个六轴IMU来代替车身加速度传感器,则可以大幅度减低成本,一个六轴IMU 的成本可能贵于一个垂向加速度的,但是三个垂向加速度跟一个六轴功能是一样的。 另外一是软件方面的更改,即CDC最后一步。CDC最后一步是控制减振器阀的电流。目前是通过PID的算法,PID是成熟广泛的算法,但是PID也有它的局限性,PID微分、积分两个系数是人为设定。虽然控制电流最终会收敛到目标值,但系数的设定会影响这个收敛时间,我们希望的是收敛时间能越短越好,所以奇瑞尝试将PID的算法替换成遗传算法。即每一步都在此基准条件之下求它的最优解,下一步又在当前最优解的基础上继续求最优解。 在线控制动技术上,线控制动的发展,目前市场上主流的还是两个技术的路线,一个是two box,另一个是one box,但真正销量来说还是以博世的two box最多。其最大的优势即冗余性。但是结合观察行业新闻,近年来自动驾驶的呼声远没有四五年前火热了,行业逐渐回归理性了。因此,线控制动虽然很重要,但是自动驾驶似乎还有点遥远,在这两个双重需求的刺激之下,目前one box还是最具性价比的一个方案。实际上除了冗余这一项,其实one box的性能都是超越two box。  one box应用在传新能源或者混动车型来说,有很多优势,首先就是它的能量回收。第一个优势,one box解耦式的能量回收比非解耦式的能量回收,回收能量要更高。第二个优势,它的建压能力也要更强一点。解耦式可以提供不同的踏板感的调教,适应不同驾驶员的习惯。第三个优势,即其制动助力失效后的减速度,可以轻松用较小的力去实现制动。 在线控转向上,奇瑞主要还是基于非解耦的EPS,而线控转向不单是L3以上自动驾驶的必要条件,如果有了这个线控转向之后,在底盘之间也能够实现附加的联合控制。如果是非解耦的系统,这个时候就难以使EPS助力电机再去驱动前轮转向,还需多个输入还需要单独的输出,变成多头控制,也就无法获得唯一收敛的效果。 不断探索智能底盘的边界 任何一项技术的发展都是必须要经过前端的客户需求。在分解到整车层级的功能,无论是技术的发展趋势,还是客户不断提高的驾乘需求。都需要分解到整车层面的智能控制,更多的协同控制,再把它分解到底盘方面,就是纵向垂向和侧向,三个方向力的控制。这三个方向的控制又落实到制动、转向、悬架、驱动上面。 其初期探索了各系统之间应用的场景。比如在EPS和ESP之间的联合控制,目前的车辆动态控制逻辑中,车辆出现不足转向或过度转向时,只有ESP介入,转向并不会介入。奇瑞团队便思考,此场景当中转向是否可以介入。为实现这种介入,必须有一个线控EPS来做支撑。在不动这些供应商蛋糕的情况下,最具可行性的一个方案,奇瑞想到了用AT指令的方式。  如图,右边是联合控制核心数学模型,此模型也是ESP核心控制二自由度的模型。它是根据前轮的转角以及车身的侧向加速度,再结合前后轮的侧偏角,通过侧向加速度以及前轮转角计算出车辆应该有的横摆值,再由理论横摆值和实际横摆值做一个对比。 技术落地,赋能未来出行 形成方案之后,还需要考虑如何落地。现在奇瑞的方案是研发一体化的控制器,控制器和子系统之间通过AT指令通讯,具体还需各控制器来执行。  在这个大的框架下,如果驾驶员驾驶一辆车以高速行驶在弯道上,从1位置到2这个位置。驾驶员发现车开始不足转向了,不按这个轨迹行驶之后,对于用户来说,本能的操作是打更多的转向,但实际上,这反而适得其反。因为前轮转角越大,侧向力在整车Y方向的分力反而越小。极端一点如果打90度转向,这个时候轮胎的侧向力变成了整车的纵向力,迫使汽车停止行驶。若此时回一些方向,让前轮更多平行于车的纵向位置,反而会提升它过弯的方式。 但就这样一个动作,大部分人都不会做,因为这是人类的本能。但是这个可以通过联合控制的方式,用线控制动和线控转向联合控制来实现。 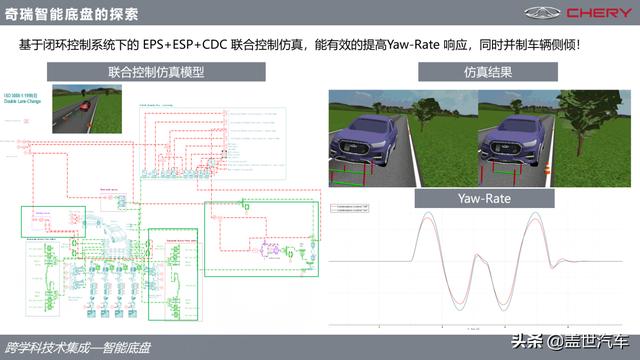 如图,是奇瑞做的EPS+ESP+CDC联合控制仿真,左边是仿真模型,右边是仿真结果,若把CDC控制逻辑提前到方向转角的输入阶段,本来CDC接到车身加速度之后才能有动作,现在提前到方向盘转角,这个时候侧身的侧倾减小,附着力却在增高。 第二阶段,域控制器依然保留,其可以直接控制四个系统的执行部分,但是同时这四个系统的子系统控制器还是保留的,作为一个冗余的备份。 智能底盘还需冷静看待 奥迪汽车在底盘开发上,处于数一数二的地位,当底盘脱去智能化的外衣之后,人们所看到的是奥迪开发的MLB平台,这个平台即使是纯机械,不带任何智能设备的话,它也是一个非常优秀的悬架系统。无论是侧向的支撑,纵向的柔度,垂向舒适度来说那都是无与伦比的。 最后,李成强调虽然现在处于智能线控底盘的高光时代,但作为底盘人,还是要清楚的认识到智能化底盘创造出价值的同时,对于底盘基本布局和设计还是不能够放松。 文章来源【盖世汽车】版权归原作者所有 |

