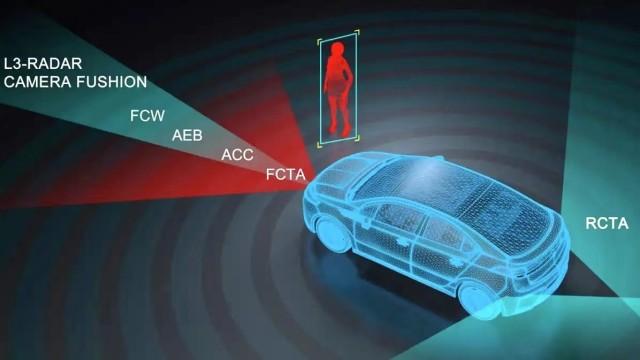
 小鹏撞完特斯拉撞,特斯拉撞完理想撞,上周对于新势力们来说,可谓是黑色一周,智能驾驶的安全性问题再一次被提到了风口浪尖,科技一定是要以安全为底线的。 其实我们从上周的这几起新势力们有代表性的事故中,不难发现,一个老生常谈的话题——静态物体的识别问题,那么为什么到了2022年下半年,这个问题依然改观不大?背后有哪些行业上的痛点?  2022年8月了,静态识别还没有长进?首先我们来看看发生事故的这几辆车,小鹏P7、特斯拉Model Y和2021款理想ONE,它们的智能驾驶感知系统都是以视觉为主导的,也就是其他比如毫米波雷达、超声波雷达系统都是用作辅助的,并且它们都没有搭载激光雷达。 其实目前主流的智能驾驶系统的工作逻辑和我们人类驾驶比较类似,通过视觉途径来感知周围的物体,利用中央计算平台完成数据处理,而后再像各个工作模块发出指令,而目前整套智能驾驶系统的处理速度,反应速度或者感知能力甚至会强于人类,面对大部分情况,几乎没有延迟就可以处理好。  但咱们这里强调的是大部分情况,而静止物体就是那少部分情况中的一种。 视觉感知,竟然会“摆烂”?那么第一个就要从视觉层面入手,为什么高速快速路上的静止物体会成为系统不认识的物体?摄像头是可以认得出这里有个东西的,但是它和我们人类的逻辑不同,系统的眼睛在处理场景时对物体的感知和分类或者说是辨别,是协同工作的,如果眼睛看到的一个东西,但辨别不出物体,系统可能就会则会默认过滤掉这个信息,说直白些就是既然不认识,那就等于不存在,直接摆烂。 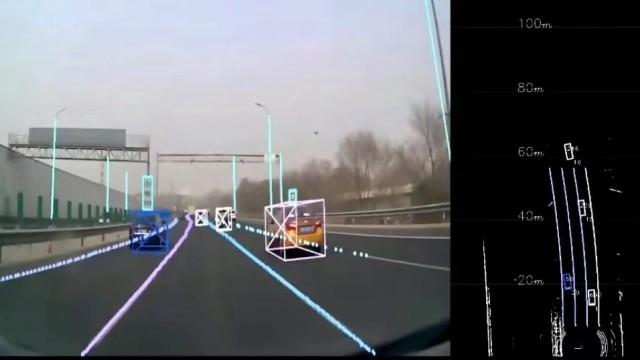 我们看到的特种车辆、不同样式的工作车或者改装车等等,视觉感知如果无法做到准确的识感知和分类,来不及处理势必带来危险。在高速上,智能驾驶的感知算法可能感知到前方的静止物体,但跟踪算法可能无法做到,这也可能导致在遇到静止物体时,整个传感器的计算无法做到瞬时收敛,然后它就躺平了。 这一点依然是个行业内的重难点,因为任何车企或者公司都无法做到,能让系统认清楚自己看到的每一个物体,所以它们只好把看到的物体,通过不断训练的神经网络,来完成数据标注、分类、定义,给这类物体赋予一个标签,这种分类方式可以极大程度的让系统能够在现有条件下尽可能多的认识物体,但依然确保十全十美。就像智己L7智能驾驶的开发者,为了让智己L7认清楚各种大货车,已经让系统自学习了上万种大货车的样貌,但这依然很难做到万无一失,总有一些漏网之鱼,而这些漏网之鱼就是智能驾驶发展过程中的拦路虎。  当然,车企们也鼓励用户们在日常驾驶中多用自家的智能驾驶功能,因为这样可以多获取一些用户数据,让车辆多学习,特斯拉使用的这种方式,其他新势力们也直接照搬了过来,毕竟数据越多,学得越多,犯错应该会变得更少。 毫米波雷达其实很无辜?问题不在它?就算视觉感知系统认不出来,不是还有毫米波雷达呢吗?它对距离、物体的大概轮廓不都应该很清楚么? 正常来说,理想状态下应该是这样,可是现实中它并不太理想,毫米波雷达对于物体的识别确实是很准的,但是就是因为很准,也遭到了大家的抱怨。 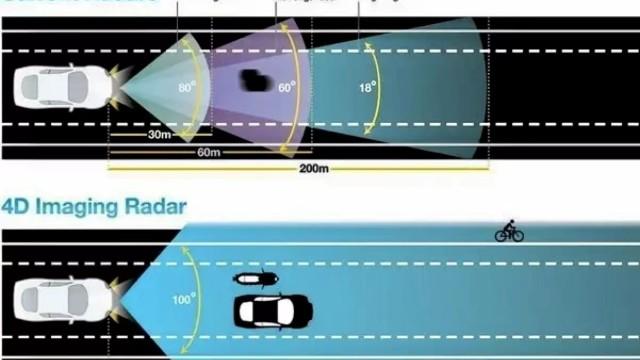 毫米波雷达通过发射电磁波,利用发射毫米波以及接受反射回来的信号,利用回波图像的强度来判断以此来计算目标物的相对速度信息、距离等信息。类似于我们人类闭着眼,光靠耳朵听,旁边车辆过去的声音,也能大概知道车辆的速度以及离我们的大概距离,但毫米波雷达是能够识别出静止物体的,它可以呈现出一幅点云信息。 但是,毫米波雷达本身缺乏高度信息以及对金属敏感性,这只是一部分缺点,当然目前出现的4D成像毫米波雷达是可以弥补这方面问题的,而毫米波雷达不能识别静止物体的问题,其实更多的是我们人为造成的,因为基础的毫米波雷达只能显示出点云图,无法完全识别出它到底感知到的是个什么东西,也就导致路面上大量的静止物体,都有可能触发它的过度反应,从而出现幽灵刹车的情况。  试想一下,路面上的广告牌、桥梁桥墩、高架、灯架、监控设备支架、信号灯等物体传输来的信号动作都有可能被视为障碍物,而我们的实际路面上这些物体又是出奇的多,那么这样的灵敏感知会导致这车就不用开了。所以毫米波雷达本身会对行驶道路中反射回来的静止物体做滤除,也就是静态杂波过滤,它把速度为零的信号基本上都抹去。 本身对于金属物体的感知就比较弱,同时速度信号为零的基本上都不感知,那么碰撞真的会在所难免。当摄像头不认识,导致无法识别,直接“摆烂”,同时毫米波雷达对于这些物体直接罢工,智能驾驶系统就真的只能让车撞上去了吗?不是还有AEB系统吗?  主动安全系统可能一点也不主动?AEB系统算法大部分通过雷达以及摄像头等来做碰撞风险监测以及协助做主动制动,当系统并不识别前方物体的时候,AEB会帮得上忙么? 相信大家或多或少的看过一些媒体做的AEB方面的测试,我们在这其中不难看出,大部分车辆在对动态假车的测试中,都能做到很高的速度值,但是一到静态几乎全军覆没,甚至看到一些比较奇怪的景象,比如系统确实是介入了,刹车了,但是最后快撞上之前自己懈劲儿了。对于城区以及高速环境下,AEB系统的敏感度也不同。 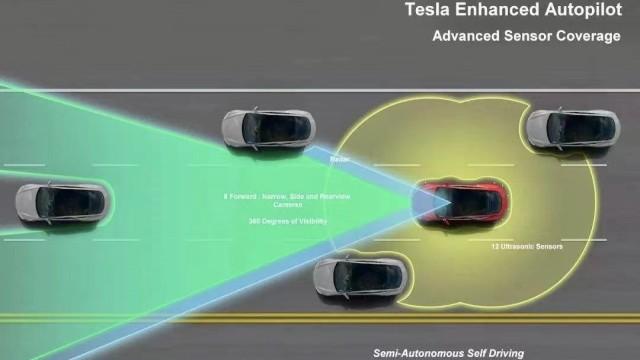 AEB确切的来说,它是作为一种减轻撞击的辅助安全系统。从蔚来官方来看,工作范围是在 8km/h—85km/h之间;在自动紧急制动被触发后,车速最多会降低 40km/h来减缓碰撞的可能,随后就会释放制动器,也就是懈劲儿了,而特斯拉也很类似,一些传统合资品牌和豪华品牌也都类似,因为它们采用的大部分都是博世、安波福的成熟方案,硬件软件也都来自它们,所以问题点都是几乎极其相似的。 AEB系统也有很多为了防止误触发的限制,和智能驾驶中的误触发类似,都是为了防止幽灵刹车,防止主动安全配置帮倒忙,所以AEB并不是完全靠得住的,智能驾驶系统无反应,它也基本上会表现出类似的举动。 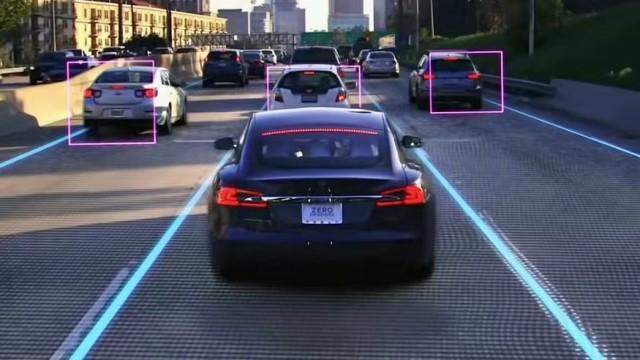 其实看到这里,你会发现我们在当前硬件基础的条件下,能做出更多努力的方向,依然是在视觉感知方面,让视觉感知系统能够学习更多,当然视觉方面也要为了防止幽灵刹车,而做出一些“取舍”,类似于毫米波雷达。 激光雷达是救星?还真不见得那么静止物体真的会一直扼住自动驾驶咽喉吗?问题一定是会被解决的,激光雷达的大规模上车,就可以在一定程度上解决这方面的问题,虽然同是雷达,但是激光雷达的感知距离、成像点云密度、空间感知方面是远在毫米波雷达之上的。 高密度的点云甚至不需要视觉,就直接能让我们看明白前方的路况,高分辨率的激光雷达配合上类似于训练视觉算法的模型,也可以让系统清晰感知前方状况,但依然不能万无一失,毫米波雷达被人为控制的部分,激光雷达也要被控制,这一点仿佛又进入了死胡同,但已经离攻克无法静态物体识别问题更进一步了。  这可能是最接近正解的方案,可惜它贵我认为要想完全克服掉静态识别问题,还是需要强大的V2X车路协同系统,基于V2X的智能辅助驾驶将会让车辆提前感知前方路况,留出充足的反应时间,这是一个需要汽车厂商、通信厂商、交通环境建设者以及监管机构等各方一起参与的局,需要共同打造一个协同式的智能交通系统,基础设施的投入才是车路协同技术实现的基础,当然这些基础设施我认为是可以一劳永逸的,值得投入。 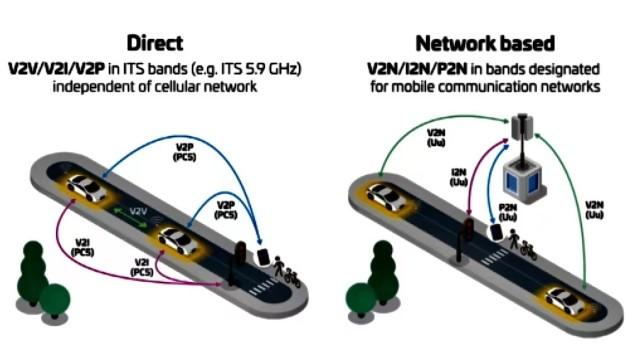 当然你会说城市里布置车路协同系统,尚且已经很困难,那么荒郊野外,偏远地区的国道,乡道县道该怎么办呢?所以这也就需要车对车的车路协同系统,其实看下来,车企需要付出的是安装车路协同模块,而政府需要完善基础设施建设,城市中部署车路协同的接发装置,而在其他地区要完善5G信号的全覆盖。 其实,目前的蔚来新一代车型上,也都预留了车路协同模块,奥迪也有所跟进部署,福特在这方面走得更快、更早,可见车路协同系统也确实是今后实现高阶自动驾驶的一个必要条件,不但可以几乎完全扫清静态物体识别方面的问题,同时也会让智能驾驶系统更完善。  总结最后,我们要说的是,车企确实需要不断完善自身的智能驾驶系统,在现有条件下做到最好。同时在宣传方面,这个宣传的度一定要被监管了,因为现在还是L2时代,就算车企宣传再怎么天花乱坠,只要出事故,驾驶者永远是第一责任人,消费者不能一直吃哑巴亏。让驾驶者也要明白,辅助驾驶不是自动驾驶,开车切勿开小差,要全神贯注,生命只有一次,不能用生命来迫使车企们去改一行代码。 文章来源【路咖汽车】版权归原作者所有 |

主持人:各位网友大家好,欢迎来到58汽车的专访直播间。我们现在特别有幸邀请到东风柳州汽车有限公司乘用车销售公司副总经理文征总,请文征总和我们的用户打个招呼。文征:各位网友大家好,我是文征。主持人:先请文 ...
