|
目前智能汽车是一个比较热门的话题,一些专家谈得比较宏观,一些厂家有意回避有关产品的技术细节,要系统研究汽车自动驾驶技术,予以科普还是比较困难的。接下来是笔者,结合百度公布的APollo1.5和2.0版本的内容,对汽车自动驾驶技术的发展现状和趋势分析,供大家参考。 一、自动驾驶汽车的三大基本功能 在传统汽车的基础上,自动驾驶汽车有自己的三大基本功能: ①视觉感知功能。主要能替代驾驶员的眼睛的功能,能分辨出道路上行人、障碍物、交通标志、标识和交通控制信号; ②实时相对地图功能。基于车辆当前位置,以及车辆本身的地图,为车辆运行提供导航的功能; ③高速规划与控制功能。替代人的功能。将车辆实际位置与要到达目的地进行比较,在对行进线路进行选择,对车辆实际运动轨迹和状态予以控制。 二、自动驾驶汽车外型及核心总成件介绍 下面图1是APollo1.5公布的自动驾驶汽车外型。给人总的印象,自动驾驶汽车是在目前现有基础上加了一些特有零部件。主要是三个部件。 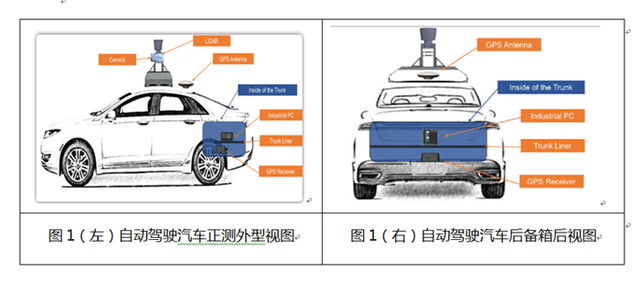 ①GPS天线,即全球定位系统天线; ②IPC,即工业级计算机; ③GPS接收机和(LiDAR),即GPS接收机和激光雷达(LiDAR)。 对汽车总成级来说,传统汽车要升级为自动驾驶汽车,必须具备一台工业级的计算机(工控机)、定位的GPS系统和激光雷达(LiDAR)系统。这三个部件是自动驾驶汽车的核心部件(含其软件系统)。 三、深入认识自动驾驶汽车的核心部件 (1)GPS天线,即全球定位系统天线(见图2)。 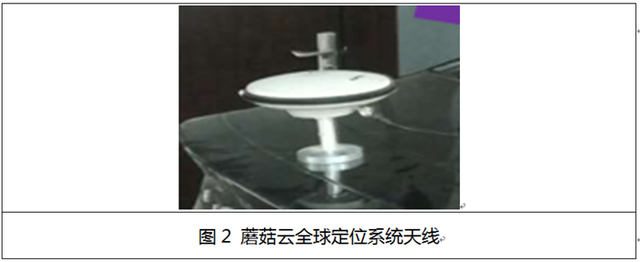 自动驾驶汽车的全球定位系统天线,与传统汽车上接送天线结构有所不同,通常是是北斗(GPS)双模二级放大32db有源天线,内置35*35陶瓷片授时蘑菇头天线。 (2)GPS接受器(见图3)  接收机主要用于运动载体的导航,它可以实时给出载体的位置和速度。这类接收机一般采用C/A码伪距测量,单点实时定位精度较低,一般为+-25MM,有SA影响时为+-100MM。 (3)IPC,即工业级计算机(见图4) 工业级计算机是相对于办公室的PC而言的,其指标要求更高。  这里应该是要用车规的计算机,比工业级的计算机要还有要高,主要指标有防震动、防水、防尘、通风散热等,要满足汽车使用环境要求。 车规的计算机安放什么位置,是一个比较困难的事情,目前放在后备箱,也是无奈的方案。 (4)LIDAR,激光雷达(见图5) 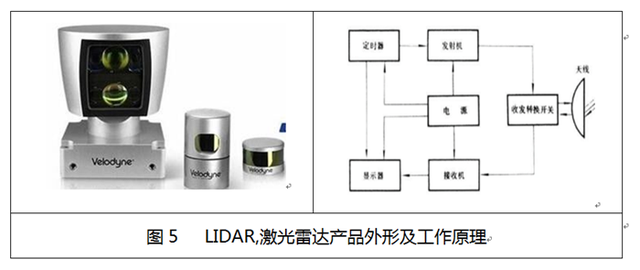 激光雷达可以获得极高的角度、距离和速度分辨率。通常角分辨率不低于0.1mard,也就是说可以分辨3km距离上相距0.3m的两个目标。(这是微波雷达无论如何也办不到的),并可同时跟踪多个目标;距离分辨率可达0.1m;速度分辨率能达到10m/s以内。距离和速度分辨率高,意味着可以利用距离——多谱勒成像技术来获得目标的清晰图像。 LIDAR是一种集激光,全球定位系统(GPS)和惯性导航系统(INS)三种技术与一身的系统,用于获得数据并生成精确的地面数字高程模型(DEM)的地形。 目前激光雷达安装在车顶上,给人不自然的感觉。 (5)自动驾驶车用摄像头(见图6) 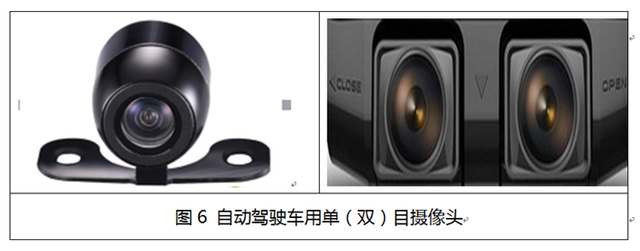 目前主要有单目和双目摄像头两种类型。 ①单目摄像头的测距原理是先通过图像匹配进行目标识别(各种车型、行人、物体等),识别出物体的具体轮廓,特别是宽度,根据传感器的尺寸,再通过目标在图像中的像素大小估算目标距离。 ②双目摄像头就是利用两幅图像的视差直接对前方雾天测量距离,无需判断物体的类型。双目摄像头的精度可达毫米级,而且双目摄像头计算距离所花费的时间远低于单目摄像头。 (注意:单目摄像头准确估算距离,要建立并不断维护一个庞大的样本特征数据库,双目摄像头测量距离,无需判断物体的类型,这是两者的区别。) 目前摄像头还没有与前风挡玻璃布置结合起来。 四、自动驾驶汽车软件功能模块 (1)物理底层模块 ①common:一些通用模块,包括数值计算、配置文件、log系统等; ②data:数据处理模块; ③drivers:驱动程序; ④canbus:can总线,负责与底盘进行数据通信; ⑤monitor:监视系统,包括硬件、软件等。 (2)人工智能层模块 ①preception:感知模块,里面包括了雷达、相机等设备的信息,并且实现障碍物识别、分类等功能。 ②control:基于计划航线和车辆状态,使用不同的控制算法来控制车辆 ③planning:决策模块,通过收集定位、车况、地图、路由、感知和预测模块的信息,计算航线; ④prediction:预测障碍物的航迹; ⑤routing:导航,生成起始点到终点的路径,根据需求产生高等级的航行信息。 ⑥e2e:端到端的深度学习模型; ⑦dreamview:web交互、可视化模块。 (3)位置信息提取层模块 ①elo:baidu高精地图定位系统; ②localization:通过gps定位; ③map:地图相关应用,提供了地图信息的接口。 (4)感器配准层模块 calibration:用于传感器配准。 目前,感知模块(传感器)是比较高端技术和端到端的深度学习模型,有待进一步挖掘。 五、自动驾驶汽车可以适宜道路环境 自动驾驶汽车可以适宜道路环境自动驾驶汽车可以适宜道路环境,如图7的自然场景。静止的物体如有:清晰车道线、树木,电线杆,路灯,交通标志牌等。注意:清晰车道线,目前还是必要的基本条件。  前面运动机动车辆、电动自行车、行人,要能正确识别。车型从摆渡车、乘用车、客车到大客车,基本上都可以实现。 目前,如何适应没有车道线的路况?还是比较困难。 六、自动驾驶技术与汽车运动部件的接口 自动驾驶主要技术: ①运用摄像头技术,“替代”人的眼睛,识别自然场景和动态运动的物体,精确地判断距离; ②运用雷达技术,“替代”人的“耳朵”,识别远处的不同物体间相对距离; ③运用计算机技术,“替代”人的大脑,分析、判断、决策; ④运用可控自动件,“替代”手和脚,来实现车辆转向、加速、制动控制,也能实现灯光(远光灯、近光灯、雾灯等)的调节。 将线控技术与人工智能结合出来,有待工程上的技术攻关。 七、自动驾驶技术目前遇到的瓶颈问题 ①激光扫描仪无法穿越固体障碍物, 如果有行人突然出现在车道上,扫描仪是无法及时检测到的; ②自动驾驶汽车不仅需要留意周边的其他车辆,还必须能够检测到周围的路人、车道、停止线、交通标识、交通灯等一系列因素; ③要有预测诸如目前行驶的车道是否会在几百米之外终止, 前方道路上是否有停泊车辆等问题的能力; ④当路面上有积雪时,无人驾驶汽车经常会面临无法“看清”道路标志及其他线索的难题,而电脑必须利用这些信息才能进行正确的定位。 八、自动驾驶技术发展趋势预判 总的发展趋势是智能化程度越来越高,但是目前人工智能水平仍然是很低的,所以说智能驾驶汽车,要取代人来安全驾驶汽车,目前应该还没有一个可以看得见的时间表。 自动驾驶技术可以使汽车驾驶安全性越来越高,随着自动驾驶技术的进步,汽车驾驶不再是一份职业,越来越是普通人的生活技能。 电动汽车会是自动驾驶最佳载体,目前许多电动汽车,其自动驾驶应用越来越多。自动的基础的是“电动”,电动的基础是“机动”。 自动驾驶技术发展趋势是整车设计一体化,目前还是在汽车的基础上,还没有与汽车成为一体,即外行人从外形上,看不出彼此之间有什么区别。 九、自动驾驶技术是人工智能技术的应用 自动驾驶还是以人为驾驶主体,自动驾驶技术是人工智能技术的应用。自动驾驶还不是无人驾驶,无人驾驶是自动驾驶的终极阶段。 文章来源【盖世汽车】版权归原作者所有 |

多个媒体报道,汽车下乡政策有望于6月初出台,鼓励车型为15万元以内的汽车(含燃油车及新能源汽车),每辆车补贴范围或在3000元-5000元。 虽然政策还没有落地,但资本市场已经闻风而动。受这个消息影响,汽车板块大 ...
销量不断走低的北京现代,最近频频传出调整策略“止损”的消息。 这几天,有知情人士向媒体透露,北京现代重庆工厂即将关闭。厂家给出了“N+1+8”的裁员赔偿方案,其中“N”代表工作年限,“1”代表一个月工资金额, ...
