|
一、ACC自适应巡航系统 是在传统定速巡航的基础上,采用雷达探测前行车辆的情况,与多功能视频控制系统(MPC:识别静置物体、行人、车道等)配合,确认本车和前车之间的相对距离和相对速度,主动控制本车行驶速度,使本车与前车保持安全合理的车间距,从而规避可能发生的追尾碰撞事故。 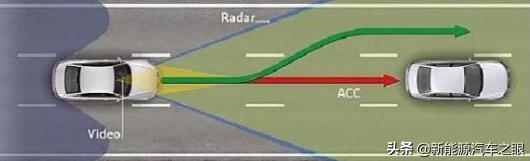 自适应巡航 二、系统主要的组成: 前中距离雷达(MRR:识别运动物体、距离探测、扭矩请求、加减速请求、报警信号)、动力控制系统(EMS或整车控制器)、制动系统控制单元(ESP)、HMI(仪表及ACC手柄)、组合开关、车身控制模块、方向盘转角传感器、安装支架等。 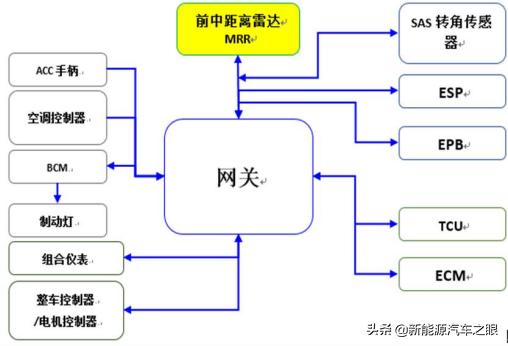 系统主要的组成 三、过程的控制 根据车主需求、雷达及多功能视频控制器,探测前方障碍物(车辆)距离、速度,经过相关计算,雷达模块发送加速、减速请求给ESP,ESP发送相关升扭、降扭请求给动力控制系统(高压电控、TCU、ECM等),必要时,ESP参与制动,以实现整车的加速、减速控制。在速度为30~150km/h 的范围内定速巡航,也可以设定车辆与前车的时距,进行速度为0~150km/h 的跟车巡航。 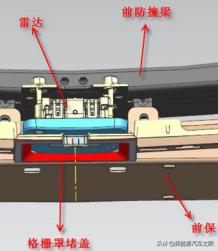 雷达、多功能视频控制器位置 四、ACC系统工作的前提 1、电子驻车(EPB)处于释放状态; 2、车辆档位处于前进档(D)上; 3、车辆无后溜; 4、车辆四门关闭; 5、主驾安全带系上; 6、仪表上ESP关闭图标未点亮; 7、仪表上陡坡缓降指示灯未点亮; 8、ABS系统未被激活; 9、本车车速≤150km/h; 10、车辆运行模式为普通模式(非沙地/泥地等); 11、车速为0时,制动踏板踏下,或车速大于0时,制动踏板未踏下; 12、仪表上无整车网络通讯故障提示; 13、自动紧急制动(AEB)关闭。 五、维修时注意的事项 1、轮速传感器和轮毂单元,带ACC配置和不带ACC配置的不能互换; 2、更换ESP系统部件均需要对ACC自适应巡航系统重新进行标定。 3、更换新件、拆装雷达、系统提示雷达角度偏差过大、维修过程中导致雷达位置变动,也需要对ACC自适应巡航系统重新进行标定。 文章来源【新能源汽车之眼】版权归原作者所有 |

