|
特来电和广汽埃安在2021年9月开幕的第十届广州车展上联合发布了Robot Charger机器人充电,发布当日,不少车企朋友纷纷也向我打听情况,经过认真分析后,我们认为这个Robot Charger在短期内无法落地应用,主要原因是特来电为了降低机器人的定位精度要求,改变了原有的标准插座和插头,如下: 1、在国标直流插座的外边缘设计了图像识别特征(右图红色指引线所示)。左图为正常的国标直流插座,右图为特来电改制后的插座。尽管特来电的充电机器人也采用视觉定位技术,但是为了降低识别引导充电座的难度,在插座外边缘上设计了尺寸规则的凹槽,并在凹槽表面均匀涂刷上高反光率的蓝色涂料(如右图红色指引线所示),便于相机提取图像特征,从而降低了图像识别算法的开发难度,以及相机硬件和计算硬件的性能要求。对于特来电来说降低了开发难度,但是对于插座厂家来说了,增加了额外的制造工艺和制造难度,也就大幅增加了制造成本。 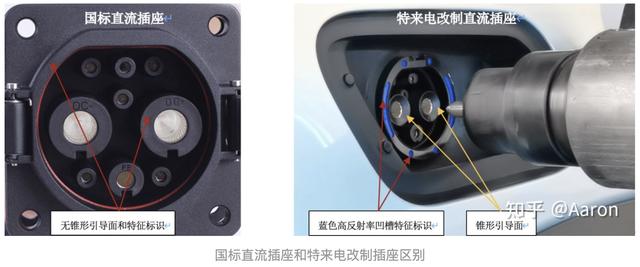 2、在国标直流插座的充电正负极端子上增加了引导锥面(右图黄色指引线所示)。增加了图像识别特征后,相机就能精确计算出插座在空间的精确坐标,剩下的工作就是引导机器人插头精准插接了。众所周知,直流充电插座和插头在功率、防护等级、安全上要求都非常高,为了满足这些要求,对于插座和插头的制造公差要求非常严格,真正应了古人的那句话,失之毫厘,谬以千里,插接精度往往要求在1mm以内甚至零点几个毫米以内才能接插成功,这对机器人轨迹控制提出了巨大的挑战,而且要求重复插接成功率非常之高,若在充电端子上做一个4~5毫米的锥形引导面,就能将机器人的轨迹控制精度和重复定位精度从零点几个毫米降低至4~5个毫米,大大降低了机器人的开发难度。但是如上述第1条所说,特来电通过更改现有的国标设计,降低了自己的开发难度,但是大大增加了插座厂家的成本。  4、加速了插座正负极端子的磨损,降低了接插次数。众所周知,直流充电电流往往达到250安培,液冷充电往往能达到600多安培,为了提高充电功率和安全性能,往往需要很大的接插力来保证正负极触点接触面足够紧、足够多,因此,机器人在接插时力量往往比较大,特来电充电机器人插头上的锥形端子会对插座上的锥形引导面造成较大的冲击和磨损,大大降低了插座的寿命。 综上,由于要所有电动车厂家都变更插座插头设计,且不向下兼融市面上已经销售的车型和已经建设好的充电桩设施,因此,笔者认为特来电本次发布的自动充电机器人更多应看作是对于电动汽车自动充电的一次探索,远远未达到普遍落地应用的程度,当然不排除特来电有其他目的,比如利用自身在充电领域的优势,引导国家修改充电接口标准,但是,这对社会资源将是一种巨大浪费,也必将引起消费者的强烈抱怨和不满。 那有没有其他公司能在不更改插座和插头的情况下实现自动充电呢?笔者在度娘的帮助下,发现有部分公司无需更改插座和插头,仅依靠视觉就能实现精准插接,像大众和爱驰的移动充电机器人,电话咨询后也能实现不更改现有充电设施,但是询价的时候发现产品都处于demo阶段。 文章来源【享奕自动充电机器人】版权归原作者所有 |

