|
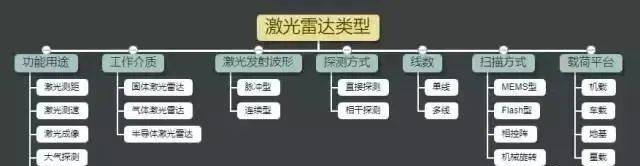
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影,有需求必然会有市场,随着激光雷达需求的不断增大,激光雷达的种类也变得琳琅满目,按照使用功能、探测方式、载荷平台等激光雷达可分为不同的类型。
激光雷达类型图 激光雷达按功能分类 激光测距雷达 激光测距雷达是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离。传统上,激光雷达可用于工业的安全检测领域,如科幻片中看到的激光墙,当有人闯入时,系统会立马做出反应,发出预警。另外,激光测距雷达在空间测绘领域也有广泛应用。但随着人工智能行业的兴起,激光测距雷达已成为机器人体内不可或缺的核心部件,配合SLAM技术使用,可帮助机器人进行实时定位导航,实现自主行走。思岚科技研制的rplidar系列配合slamware模块使用是目前服务机器人自主定位导航的典型代表,其在25米测距半径内,可完成每秒上万次的激光测距,并实现毫米级别的解析度。 激光测速雷达 激光测速雷达是对物体移动速度的测量,通过对被测物体进行两次有特定时间间隔的激光测距,从而得到该被测物体的移动速度。 激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。 另一类测速方法是利用多普勒频移。多普勒频移是指目标与激光雷达之间存在相对速度时,接收回波信号的频率与发射信号的频率之间会产生一个频率差,这个频率差就是多普勒频移。 激光成像雷达 激光成像雷达可用于探测和跟踪目标、获得目标方位及速度信息等。它能够完成普通雷达所不能完成的任务,如探测潜艇、水雷、隐藏的军事目标等等。在军事、航空航天、工业和医学领域被广泛应用。
大气探测激光雷达 大气探测激光雷达主要是用来探测大气中的分子、烟雾的密度、温度、风速、风向及大气中水蒸气的浓度的,以达到对大气环境进行监测及对暴风雨、沙尘暴等灾害性天气进行预报的目的。 跟踪雷达 跟踪雷达可以连续的去跟踪一个目标,并测量该目标的坐标,提供目标的运动轨迹。不仅用于火炮控制、导弹制导、外弹道测量、卫星跟踪、突防技术研究等,而且在气象、交通、科学研究等领域也在日益扩大。 按工作介质分类 固体激光雷达 固体激光雷达峰值功率高,输出波长范围与现有的光学元件与器件,输出长范围与现有的光学元件与器件(如调制器、隔离器和探测器)以及大气传输特性相匹配等,而且很容易实现主振荡器-功率放大器(MOPA)结构,再加上效率高、体积小、重量轻、可靠性高和稳定性好等导体,固体激光雷达优先在机载和天基系统中应用。近年来,激光雷达发展的重点是二极管泵浦固体激光雷达。 气体激光雷达 气体激光雷达以CO2激光雷达为代表,它工作在红外波段 ,大气传输衰减小,探测距离远,已经在大气风场和环境监测方面发挥了很大作用,但体积大,使用的中红外 HgCdTe探测器必须在77K温度下工作,限制了气体激光雷达的发展。 半导体激光雷达 半导体激光雷达能以高重复频率方式连续工作,具有长寿命,小体积,低成本和对人眼伤害小的优点,被广泛应用于后向散射信号比较强的Mie散射测量,如探测云底高度。半导体激光雷达的潜在应用是测量能见度,获得大气边界层中的气溶胶消光廓线和识别雨雪等,易于制成机载设备。目前芬兰Vaisala公司研制的CT25K激光测云仪是半导体测云激光雷达的典型代表,其云底高度的测量范围可达7500m。 按线数分类 单线激光雷达 单线激光雷达主要用于规避障碍物,其扫描速度快、分辨率强、可靠性高。由于单线激光雷达比多线和3D激光雷达在角频率和灵敏度反映更加快捷,所以,在测试周围障碍物的距离和精度上都更加精 确。但是,单线雷达只能平面式扫描,不能测量物体高度,有一定局限性。当前主要应用于服务机器人身上,如我们常见的扫地机器人。 多线激光雷达 多线激光雷达主要应用于汽车的雷达成像,相比单线激光雷达在维度提升和场景还原上有了质的改变,可以识别物体的高度信息。多线激光雷达常规是2.5D,而且可以做到3D。目前在国际市场上推出的主要有 4线、8线、16 线、32 线和 64 线。但价格高昂,大多车企不会选用。
按扫描方式分类 MEMS型激光雷达 MEMS 型激光雷达可以动态调整自己的扫描模式,以此来聚焦特殊物体,采集更远更小物体的细节信息并对其进行识别,这是传统机械激光雷达无法实现的。MEMS整套系统只需一个很小的反射镜就能引导固定的激光束射向不同方向。由于反射镜很小,因此其惯性力矩并不大,可以快速移动,速度快到可以在不到一秒时间里跟踪到 2D 扫描模式。 Flash型激光雷达 Flash型激光雷达能快速记录整个场景,避免了扫描过程中目标或激光雷达移动带来的各种麻烦,它运行起来比较像摄像头。激光束会直接向各个方向漫射,因此只要一次快闪就能照亮整个场景。随后,系统会利用微型传感器阵列采集不同方向反射回来的激光束。Flash LiDAR有它的优势,当然也存在一定的缺陷。当像素越大,需要处理的信号就会越多,如果将海量像素塞进光电探测器,必然会带来各种干扰,其结果就是精度的下降。 相控阵激光雷达 相控阵激光雷达搭载的一排发射器可以通过调整信号的相对相位来改变激光束的发射方向。目前大多数相控阵激光雷达还在实验室里呆着,而现在仍停留在旋转式或 MEMS 激光雷达的时代, 机械旋转式激光雷达 机械旋转式激光雷达是发展比较早的激光雷达,目前技术比较成熟,但机械旋转式激光雷达系统结构十分复杂,且各核心组件价格也都颇为昂贵,其中主要包括激光器、扫描器、光学组件、光电探测器、接收IC以及位置和导航器件等。由于硬件成本高,导致量产困难,且稳定性也有待提升,目前固态激光雷达成为很多公司的发展方向。 按探测方式分类 直接探测激光雷达 直接探测型激光雷达的基本结构与激光测距机颇为相近。工作时,由发射系统发送一个信号,经目标反射后被接收系统收集,通过测量激光信号往返传播的时间而确定目标的距离。至于目标的径向速度,则可以由反射光的多普勒频移来确定,也可以测量两个或多个距离,并计算其变化率而求得速度。 相干探测激光雷达 相干探测型激光雷达有单稳与双稳之分,在所谓单稳系统中,发送与接收信号共用一个光学孔径,并由发送-接收开关隔离。而双稳系统则包括两个光学孔径,分别供发送与接收信号使用,发送-接收开关自然不再需要,其余部分与单稳系统相同。 按激光发射波形分类 连续型激光雷达从激光的原理来看,连续激光就是一直有光出来,就像打开手电筒的开关,它的光会一直亮着(特殊情况除外)。连续激光是依靠持续亮光到待测高度,进行某个高度下数据采集。由于连续激光的工作特点,某时某刻只能采集到一个点的数据。因为风数据的不确定特性,用一点代表某个高度的风况,显然有些片面。因此有些厂家折中的办法是采取旋转360度,在这个圆边上面采集多点进行平均评估,显然这是一个虚拟平面中的多点统计数据的概念。 脉冲型激光雷达 脉冲激光输出的激光是不连续的,而是一闪一闪的。脉冲激光的原理是发射几万个的激光粒子,根据国际通用的多普勒原理,从这几万个激光粒子的反射情况来综合评价某个高度的风况,这个是一个立体的概念,因此才有探测长度的理论。从激光的特性来看,脉冲激光要比连续激光测量的点位多几十倍,更能够精确的反应出某个高度风况。 本文来源【亚洲新能源汽车网】版权归原作者所有 |