|
作者:杜镇源 1李华青2 1.西南大学 电子信息工程学院,重庆 400715) 2.非线性电路与智能信息处理重庆市重点实验室,重庆 400715) 1、当前背景与成熟方法介绍 随着动力电池工业领域的不断发展,对电池生产的机床和车间生产带的生产测速、计数功能的要求越来越高。目前较为成熟的动力电池生产流程中的测速方法主要有以下几种:伺服编码、光电测速、视觉拍照-面阵、视觉拍照-线扫描。 伺服编码是一种基于伺服电机的编码计数方式。伺服电机的编码器的计数功能是通过统计每转脉冲数,也就是编码器每转一圈发送回的脉冲数来进行计数,然后返回到控制台,这就能通过如上数圈数的方式来计数。在电池生产领域常常由于其对于外设的要求几乎为零且其所处生产线的位置而被应用在第一道测速关卡。 光电测速是一种基于光电反射原理的测速方式。通过光的反射来得到脉冲信号从而计数。这种方法的实现通常是将反光材料粘贴于被测轴的测量部位上构成反射面。当电池生产传送带或者电池原件通过的时候,会产生光反射,根据反射的时常就可以测出速度。常用的光电反射材料通常为专用测速反射的纸,金属等,当然目前也可用铝箔等反光材料替代。 视觉拍照-面阵方法通过拍照来获取当前传送带上的物品特征,然后与已经被提供或者测试过的电池相关外形外貌特点进行比对,从而得出当前照片是否有要求的电池原件出现而计数。 视觉拍照-线扫描也是基于照片的测速计数方式,但是与传统拍照不同,线扫描是基于二维的拍照方法,现在常用的为6K拍照。在物品经过被拍下之后即可计数。 2、各成熟测速方法的优点与存在的问题 上述的主要四种方法在目前来说都应用广泛且各有优点,但是相对来说并不是十全十美,它们都具有一些并不好解决的缺点。 伺服编码计数作为一种应用广泛的方法,通过伺服电机本身传输的脉冲进行编码。但是其本身并不存在二次保障,即当计数错误或者脉冲漏掉之后没有保障系统,且并不利于维护。 光电测速是一种灵敏度较高的测速方法,且由于其物理反射的测速原理可靠性相对较高。但是存在一个非常显著的问题,当更换产品之后,相应的光源等相关数据也要变化,这是极为不便的。 视觉拍照-面阵是一种易于理解的测速方法,与光电测速相同,此方法也对使用环境和条件要求很高,需要经常更换数据,并不利于使用。 视觉拍照-线扫描方法本身并不存在较大缺陷,但是其成本相对很高,要装配相关的相机,摄像头,还要考虑到软件配套等问题,从而使得其在成本方面有较大缺陷,导致使用受阻和维修不便。 3、基于图像运动模糊的速度检测方法原理 3.1图像的运动模糊 在我们生活中会经常遇到以下情况,当摄像装置曝光时间不变的情况下,一个物体的运动速度越快,出现重影模糊的可能性越大,模糊程度越严重,如下图所示:  图1运动模糊示意图 这种模糊的专业名词为运动模糊(motionblur),运动模糊是静态场景或一系列的图片像电影或是动画中快速移动的物体造成明显的模糊拖动痕迹。而在面对这种情况的时候,人们大多的想法是将模糊图像复原,如下图所示: 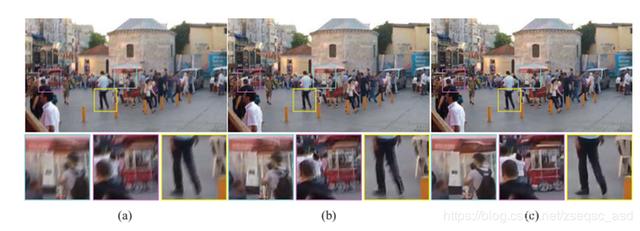 图2运动模糊的图像复原 这种模糊方式与在动力电池生产线中的相对位移的情况非常相似。如果抽象来看,它们都是属于在背景环境不动的情况下,图片中的部分物体进行运动,这样就会造成生产车间的传送带和电池原件在图片中的运动模糊。 当前较为流行的复原技术是深度学习的复原方法,首先构建深度学习网络,然后根据这个网络用多组相同两张照片(一张模糊,一张清晰)的对其进行训练。相关内容在[1]中有较为详细的阐述。 3.2图像运动模糊的速度检测方法 根据上述我们知道,图像运动模糊本身就是由于物体高速运动从而产生的图片效果。首先在[6]中对于如何利用互补序列将运动模糊复原进行了研究,在[7]中对未来的运动模糊复原工作进行了展望。与此同时,[8]首先从光学角度原理性的分析了运动模糊的退化参数,给出了定量的数据。 由此可见,就目前来看对于图片的运动模糊的复原技术和退化原理已经有了非常深刻的研究了。那么是否可以根据图片的模糊效果逆推模糊物体的瞬时运动速度呢?答案是可行的,在[2]中首先详细阐述了相对古老的图片模糊复原的技巧,然后在[3]中对由图片模糊的检测速度的可能性给出了肯定的答复。 除此之外,[9]非常贴切的研究了图片中局部运动模糊的测速方式,为本文基于频域的研究打下了基础。而[10]、[11]和[12]展示了运动模糊在测速,辨识等领域的成功研究和应用示例。由以上可以得出,这种速度检测法首先是可行的。 其次由于在动力电池的运动传输带上进行运动的物体/传输工具,都会由于其的相对运动而在适合的曝光条件下造成运动模糊。所以通过对图片运动模糊程度估算速度的方法非常适合用于在动力电池生产线上的测速问题。 傅里叶变换(FourierTransform)是将一个物体从时域变换为频域的强有力的工具。人类对于模糊的图像虽然可以分辨出图片大致的内容,但是肉眼观察会丢失很多的细节信息。当我们对同一张图片的模糊和正常情况下分别进行二维离散傅里叶变换(DFT):  (式1) 首先展示原图及其傅里叶变换分布,如下图所示: 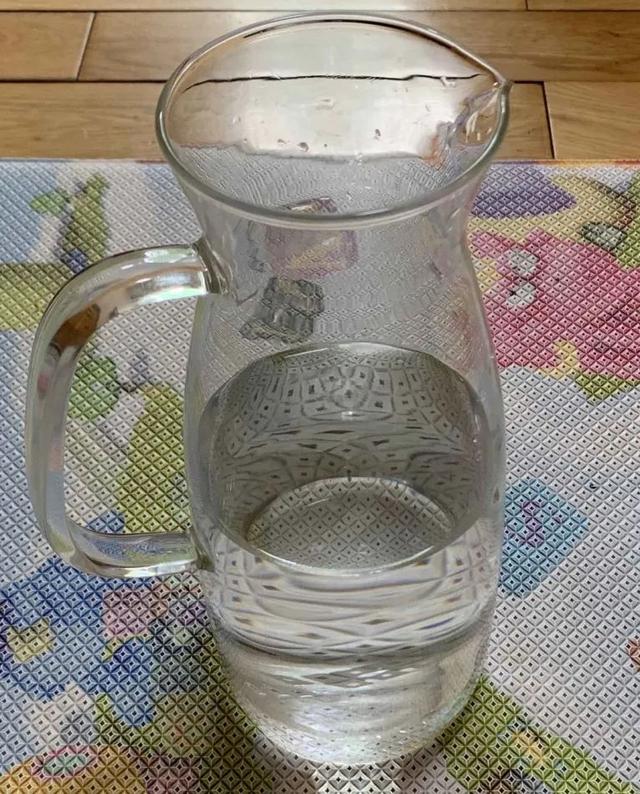 图3傅里叶变换原图 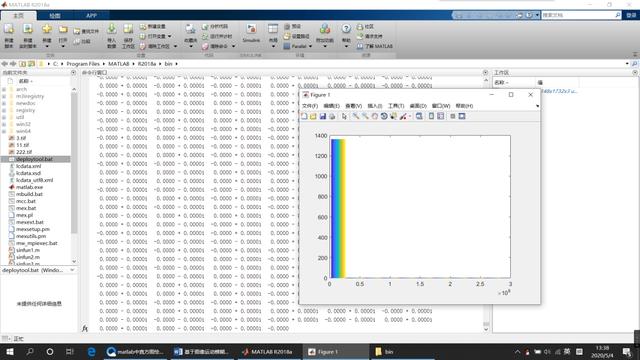 图4原图对应的频谱图 由上图可以看出,其原图(没有运动模糊)的傅里叶变换的主要分布是0~0.25且点数在1350点左右,相对应的也就是速度为0的状态。 接下来分析当有运动模糊的时候图片在频域发生的变化: 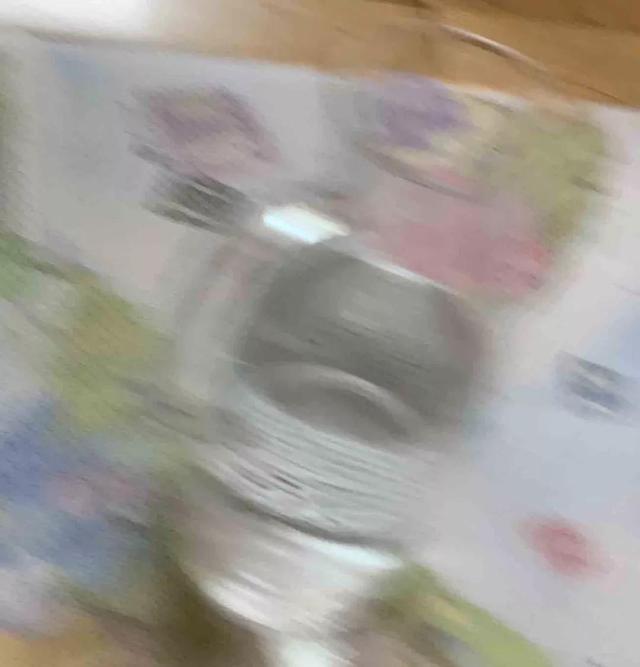 图5模糊图片  图6模糊图片的频谱图 我们可以发现,同样是一个水杯的图像,后者已经出现严重的运动模糊状况。而通过分析其傅里叶频谱我们可以发现,其傅里叶变换主要分布在0~0.5的区间内,点数约为2200点。 通过对比两图的傅里叶变化我们可以发现在图片内容相同的前提下。静止的图片傅里叶变换主要分布在0~0.25,而运动(产生运动模糊)的图片分布在0~0.5。且静止的图片中傅里叶变换分布在0~0.25的点每个约有1350,而运动的图片中傅里叶变换分布在0~0.5的点每个约有2200个。 在给出定量的回答之后,给出定性的结论:物体的运动速度越快,其照片的傅里叶变换主要数值的分布广,且分布在每个数值的点集中,相对来说,模糊图片的傅里叶变换在主要数值分布的点相对于清晰的就多。 这些多出来的点是哪里来的呢?它们是来源于次要数值分布的点,例如看向刚才的直方图,虽然大多数分布在0~0.5,但是分布的上下限分布在0~6,所以多出来的就是由0.5~6处的点集中到多数分布上的。 3.3数值定性检测方法 考虑到如果直接对傅里叶分布的直方图进行相似度对比,需要对比多个变量,因此可以将人工智能(ArtificialIntelligence)的概念引入从而更好的解决这个问题。就目前来看,主要有两种方法可以对其进行解决。 在[2]中给出了直接利用图像来训练机械的方法。在[4]中提到了利用数组数据进行分类的方法。只要把进行过傅里叶变换的数据导入其中,就可以进行机械学习的判定。但是由于[4]中只给出了两个元素的数组判定方法,所以可以根据文献[5]复杂化整个神经网络,然后再进行判定。 3.4检测稳定性以及可靠性 在电池工业中对于速度的检测准确性是一个非常重要的指标,在[3]中对传统方法(没有依靠人工智能检测)的运动模糊速度检测的准确度误差就在2%左右。以此推测,如果能够较好的运用人工智能,那么检测的准确度误差应当低于2%。 4、基于图像运动模糊的速度检测方法的优势与缺点 4.1方法的优势 通过以上分析,可以发现,该方法应用在电池工业领域的优势有二:1、对硬件要求低:该方法对于照片的采取没有过高的要求,仅要求采样相机具有可曝光时间即可; 2、数字取样:在现有的诸多方法中,都是基于模拟的取样分析,也就是现有方法的实际思想仍然是通过对一段时间内所走过的路程相除进行分析,这种的缺点也较为明显,对检测空间以及环境要求较高,而本方法采用数字取样,尽需通过一张照片就可大致分析出当前速度。 4.2方法缺点 1、对曝光要求高:该方法对于曝光的时间要求极高,也就是必须在相同曝光条件下,才可以使用此方法进行检测; 2、检测速度范围小:上述提到,该方法对曝光时间的控制要求高,这也就说明当曝光相同的时候检测速度的范围也是有限的。因为如果物体运动非常慢,并不会出现运动模糊。但当物体运动速度过快,运动模糊充斥整个平面之后,更快的速度并不会造成更严重运动模糊,所以该检测方法在相同曝光条件下检测速度的范围较小。 不过应当考虑到的是,通常一个电池生产车间的各个需要检测的位置中的传送带的速度变化不会过大,也就是说在电池工业方面并不需要频繁的调整曝光时间,所以此缺点的影响较小; 3、需要样本训练:该方法由于在最后采用了人工只能的分析方法,导致在使用前需要较大量的样本进行调训练。 5、改进以及后续研发建议 1、在以后的的研发中,可以针对曝光时间于测速范围之间的关系进行实验与调整,从而在使用中方便进行分析; 2、在本实验中由于采用的MATLAB进行DFT的计算以及图形的输出,可以明显发现计算速度相对较慢,所以在之后的设计中可以利用DSP处理器进行编程计算从而大大提高计算速度; 3、AI不仅可以分析速度,同时也可根据图片中产品特征对图片中出现物体进行辨认,所以后续研发中可以在此基础上深入研究从而为该功能增加计数研究。 6、参考文献 [1]Seungjun Nah. Deep Multi-scaleConvolutional Neural Network for Dynamic Scene Deblurring [J] [2]XU Cheng:Imagevelocity measurement based on motion blurring effect[J] [3]金守峰:基于运动模糊图像的车载视觉测速方法[J].中国工程机械学报 [4]ZhenyuanDu:No.2018046[OL/CP].2020MCM/ICM.2020 [5]陈明:Matlab神经网络与实例精解[M].清华大学出版社 [6]叶晓杰:基于闪动快门的互补序列对的运动模糊图像复原[J].光子学报 [7]刘桂雄:运动模糊图像复原技术研究进展与展望[J].激光杂志 [8]张虹:光学测速图像退化参数算法的研究.[J].燕山大学 [9]许元男:基于局部运动模糊图像的测速方法[J].光电工程 [10]李刚:基于图像直方图的车牌图像二值化方法研究[J].交通运输系统工程与信息. [11]侯远韶:机器视觉系统中光源的选择[J].洛阳师范学院学报 [12]刘红亮:基于序列图像匹配的车载自主测速方法[J].系统工程与电子技术 文章来源【动力电池网】版权归原作者所有 |

